迷你软体机器人由柔软材料制成的小型机器人,通常在毫米或更小的尺度上工作。体积小的独特优势使其能够在狭小、复杂的环境中灵活操作,在精细抓取、药物递送和医疗诊断等有着广泛的潜在应用。作为软机器人的核心部件之一,软驱动器用来驱动软体的变形来实现各种功能。其中气动或液压软驱动器由于其独特优势,比如模具化制造、快速响应、以及高动力输出等,被广泛应用于软机器人领域。但如何将液动软驱动器迷你化,同时兼具快速变形以及形状锁定等功能,对迷你软机器人的制造、设计、驱动以及材料选择提出了大的挑战。
近日,北卡州立大学尹杰团队首次报道了利用商用多材料3D打印机(Stratasys Object 260)高效高精度、直接一体成型3D打印各种兼具可编程变形与形状记忆的迷你液压软驱动器。
该软驱动器采用多层复合材料薄片结构,总厚度不到一毫米,由硬的形状记忆聚合物(shape memory polymer)与内嵌微流控通道网络的软弹性体(microfluidic channeled elastomer)组成(图1a)。微流控通道通过用不固化的流体替换固体支撑材料直接打印,实现了高分辨率。这消除了传统3D打印中微流控通道内溶解支撑材料这一耗时且具挑战性的步骤。通过直接打印软硬材料在空间的分布以及平面与立体微流控通道网络的设计,可以在液压驱动下迅速实现各种二维到三维的可编程形状变化。当生成目标形状时,利用形状记忆高分子材料(SMP)的特性(图1b),既可以快速临时锁定目标形状而无需一直保持液压状态,也可以快速恢复到初始形貌来重新生成其它目标形状。该研究有望在三维快速成型,迷你软机器人,医疗软体机器人,无损精细抓取等领域找到潜在应用。
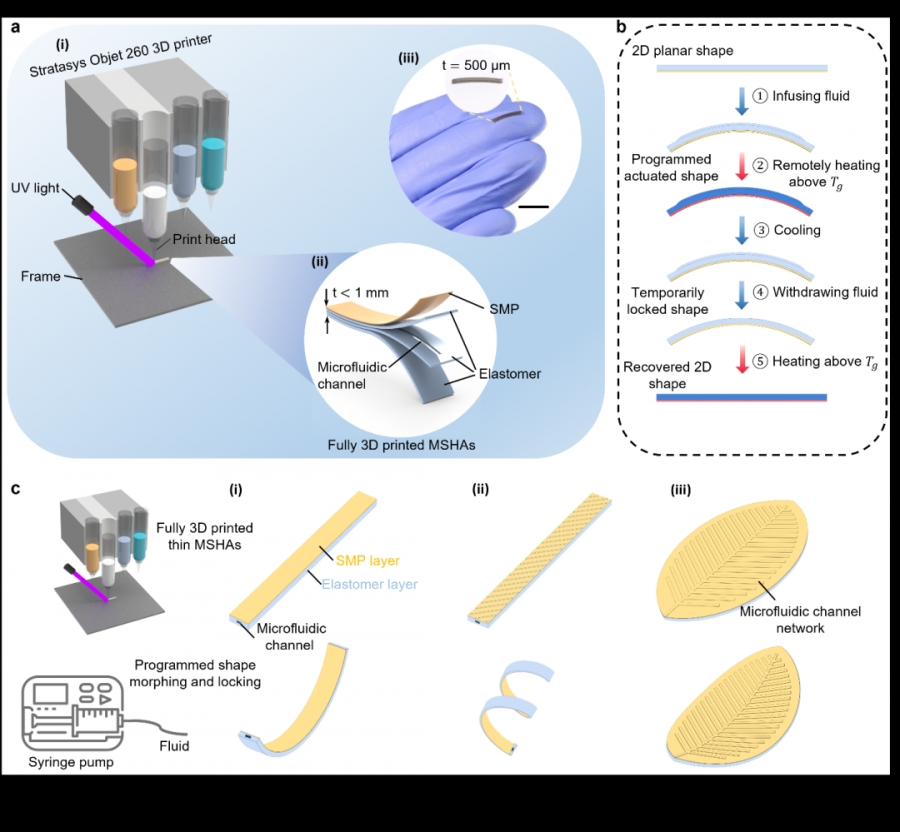
图1:基于多材料3D打印工艺的微流道柔性执行器的制造以及其形状记忆特性描述
通过调节3D打印软硬材料空间分布,在简单的单通道液压驱动下,一根薄片条状驱动器可以迅速单向或双向弯曲成一个闭环,其最小弯曲半径可小于1毫米,也可以弯曲成波浪形,以及扭曲成藤蔓的螺旋形。利用弯曲与扭曲特性,团队设计了多种无损伤精细软抓手,通过一系列复杂的抓取任务来展示其优越的特性。例如光滑物体的抓取(图2a-2d),不规则物体抓取(图2e-2f)以及生物活体比如蚂蚁的抓取(图2g-2h)。可见无论是微小的头发丝,亦或是水中游动的虾米,该打印方法都能够提供灵活的设计思路生成对应的软体驱动器。同时,对于相对大型的物体,多模态类藤蔓液压软体驱动器可以轻松完成抓取任务(图2i-k)。
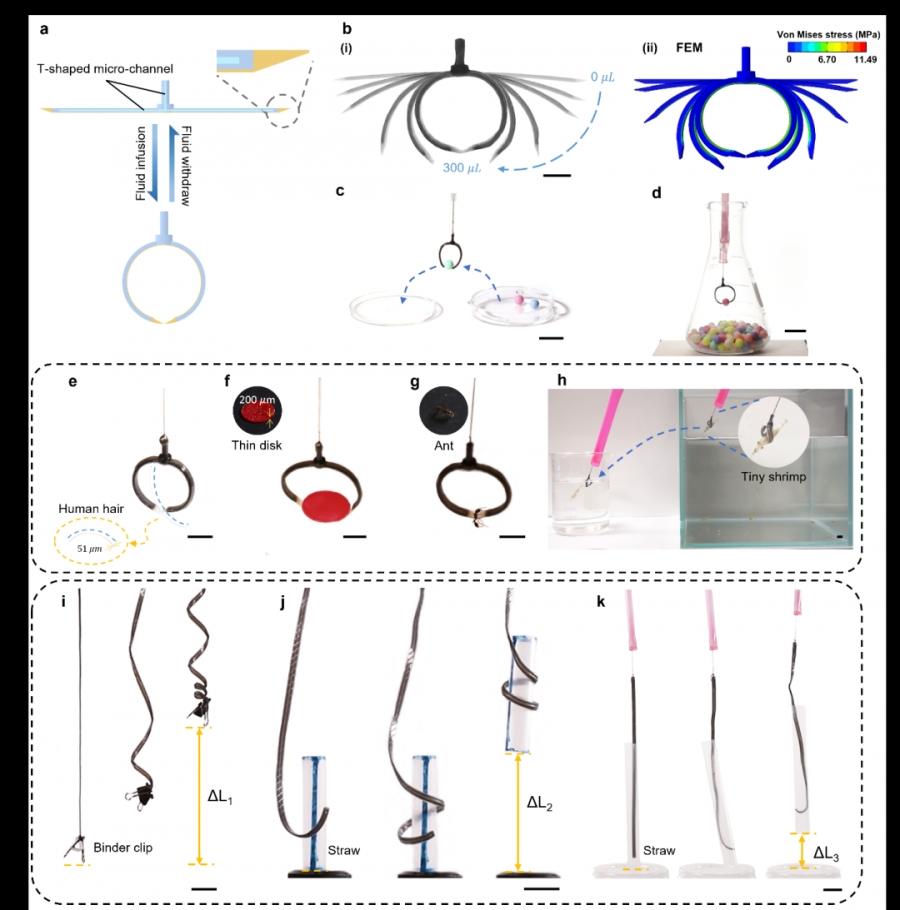
图2:微流道驱动的柔性抓手及多模态抓具的应用展示
结合形状记忆材料和微流道驱动器独特的优势,在局部受热的环境下,该液压驱动器可以完成自锁,避免了液压系统需要持续提供压力的问题(图3a)。同时对于复杂的微流道网络结构,该3D打印方式可以在单输入的情况下完成复杂的形变(图3b-3c),这也为相关科研人员在设计和控制柔性器件提供了参考。
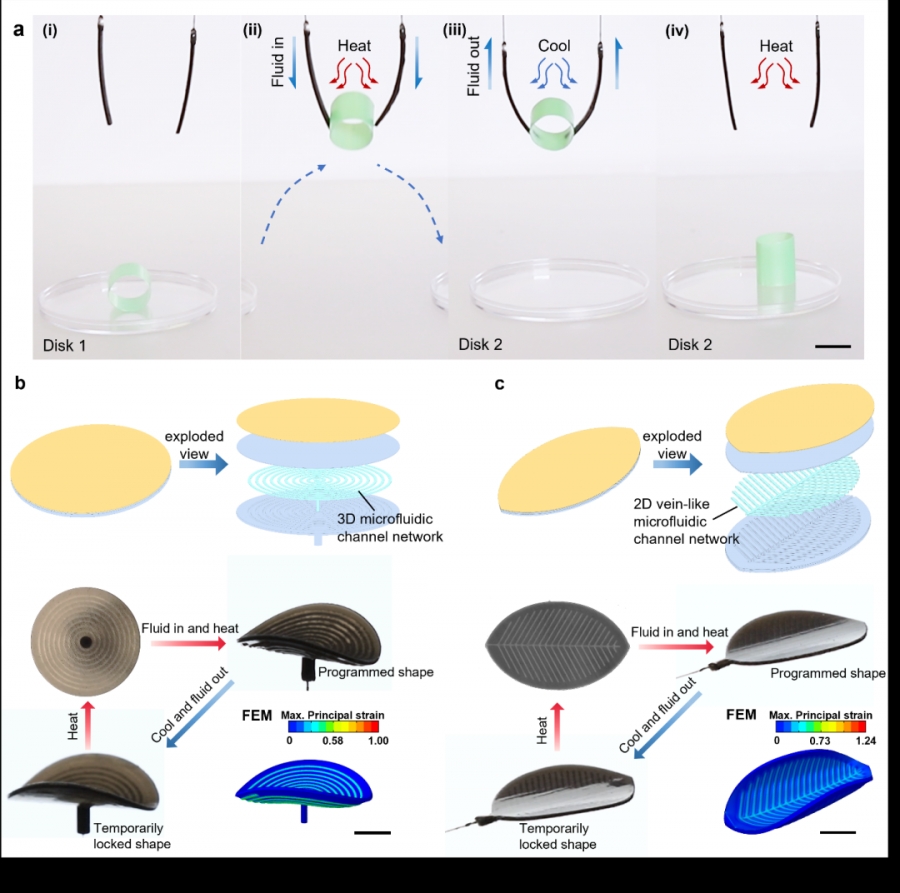
图3:3D打印微型液压柔性驱动器的变形与形状记忆效果展示
该研究以“Fully 3D-Printed Miniature Soft Hydraulic Actuators with Shape Memory Effect for Morphing and Manipulation” 为题发表于Advanced Materials (AM)。北卡罗莱纳州立大学尹杰教授为该论文通讯作者,博士研究生清海涛和赤银鼎博士为共同第一作者,其他作者还包括洪尧烨博士,赵耀博士,博士研究生漆方杰和李艳滨博士。

 湘公网安备 43030502000175号
建议您使用Chrome、Firefox、Edge、IE10及以上版本和360等主流浏览器浏览本网站!
湘公网安备 43030502000175号
建议您使用Chrome、Firefox、Edge、IE10及以上版本和360等主流浏览器浏览本网站!


 返回列表
返回列表